


- Más
China presenta el primer robot minero espacial de fabricación nacional
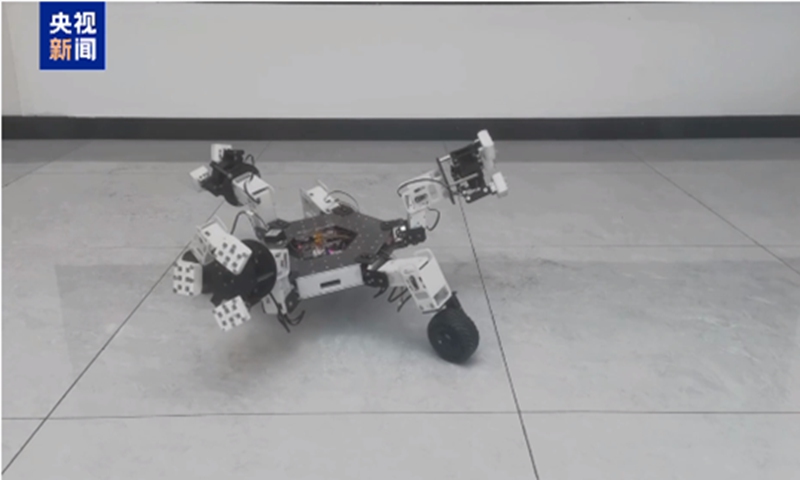
Investigadores de la Universidad de Minería y Tecnología de China desarrollan el primer robot minero espacial de China. Foto: Captura de pantalla de CCTV News
El primer robot minero espacial de China ha sido desarrollado por la Universidad de Minería y Tecnología de China (CUMT). No solo se adapta a las condiciones de microgravedad del espacio, sino que también navega por el terreno accidentado y craterizado de los asteroides, informó CCTV News el domingo. El prototipo ya ha presentado patentes ante las autoridades pertinentes y ha superado con éxito las revisiones preliminares, según el informe.
Este robot minero espacial multifuncional ha sido desarrollado por un equipo de investigación dirigido por el profesor Liu Xinhua en la CUMT. Según CCTV, presenta una configuración de seis patas con tres extremidades con ruedas y tres extremidades con garras.
Liu explicó que el diseño se creó principalmente para adaptarse al entorno de microgravedad del espacio, según el informe.
Los robots mineros espaciales se enfrentan a la exploración geológica y la recolección de minerales en cuerpos extraterrestres, lo que requiere capacidades esenciales de perforación. Bajo la gravedad terrestre, el propio peso del robot es suficiente para soportar la penetración de la perforadora. Sin embargo, la gravedad lunar es solo una sexta parte de la terrestre, y los asteroides suelen presentar gravedad ultrabaja, lo que plantea importantes desafíos para la perforación de sus superficies.
Para abordar el problema causado por la microgravedad, el equipo se inspiró en las estructuras de garras y espinas de los insectos y equipó al robot con extremidades con garras especializadas. Liu explicó que el diseño de sus garras, de tipo matriz, mejora la adhesión y la capacidad de anclaje en microgravedad, lo que permite al robot estabilizarse para la toma de muestras y adaptar su movimiento al terreno.
Además de la adaptación a la microgravedad, la estructura móvil biónica de seis patas del robot combina ruedas y mecanismos de anclaje en las puntas de las extremidades, lo que permite la travesía por superficies irregulares de asteroides, según el informe.
Liu afirmó que han logrado experimentos equivalentes en condiciones de microgravedad. "En entornos simulados de suelo lunar, el robot puede caminar, anclarse e incluso recolectar muestras", añadió.
Actualmente, el prototipo del robot de minería espacial ha solicitado patentes ante las autoridades pertinentes y ha superado las revisiones iniciales, según el informe.
Para que el robot resista mejor las fluctuaciones extremas de temperatura, las condiciones de vacío, la radiación espacial y las limitaciones de peso y volumen de los cuerpos celestes, el equipo también construyó un campo de entrenamiento simulado.
El entorno simulado reproduce la superficie erosionada de asteroides cercanos a la Tierra mediante suelo arenoso y adopta un sistema de suspensión para simular las variaciones de microgravedad, explicó Hua Dezheng, profesor asociado del CUMT. Mediante el funcionamiento coordinado del sistema de suspensión diferencial de seis patas y los mecanismos de embrague, el robot ha podido ajustar su forma estructural al entorno, adaptándose así a la compleja superficie de los terrenos extraterrestres, según los miembros del equipo.
Para dominar habilidades más avanzadas, el robot recibirá entrenamiento avanzado en el Laboratorio Estatal Clave de Construcción Inteligente, Operación y Mantenimiento Saludables de Ingeniería Subterránea Profunda del CUMT, donde la instalación puede simular con precisión las condiciones extremas de la superficie lunar, según CCTV.
Tras replicar el entorno lunar, el equipo empleó suelo lunar simulado con propiedades muy similares a las del regolito lunar real para lograr una reconstrucción de alta fidelidad de las características estratigráficas de la luna.
"Esto crea condiciones prácticamente idénticas a las de la superficie lunar", declaró Li Ruilin, profesor asociado del laboratorio. "Los experimentos realizados en estas condiciones simuladas arrojan datos que se aproximan bastante a los resultados reales de las misiones lunares".
